Каталог
Корзина пуста
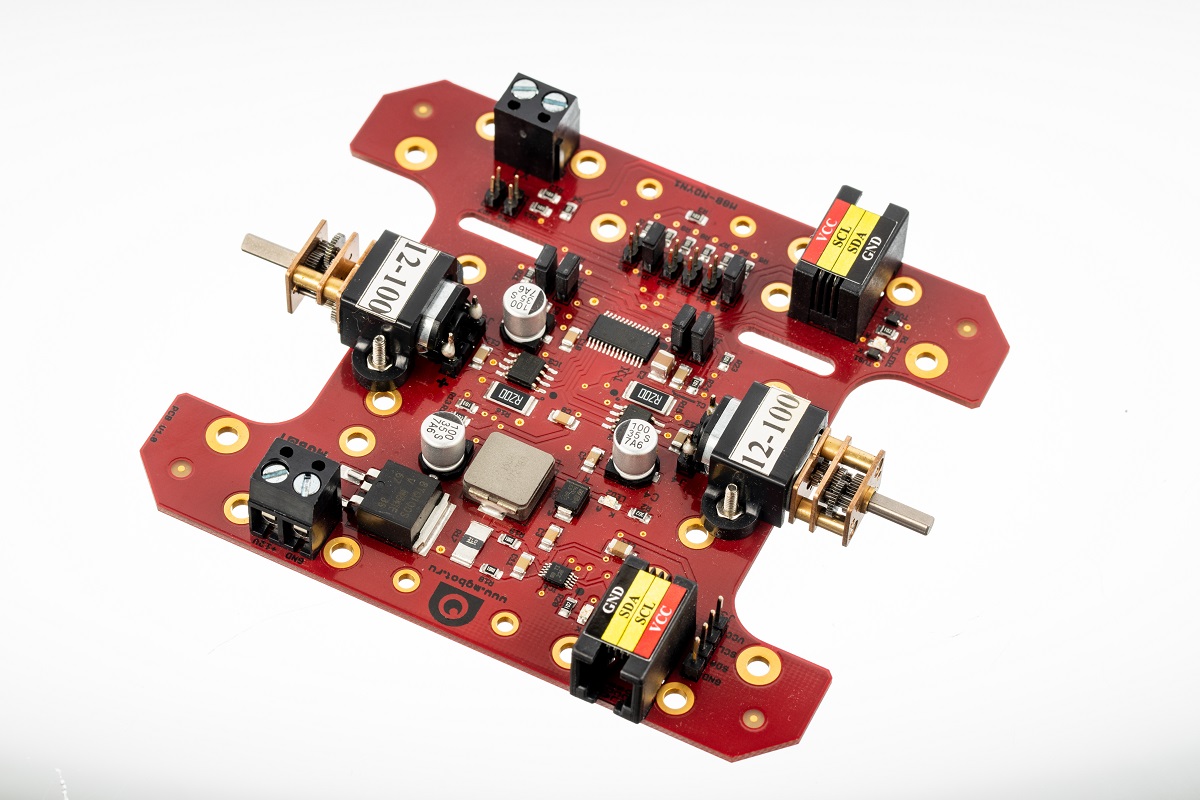
Моторная плата MGB-MDYN1 представляет собой основу для создания движущегося робота. Имеется два мотора типа N20 и возможность закрепить два пассивных колеса (волокуши). Оси моторов и пассивные колеса расположены на взаимно перпендикулярных диаметрах, что делает платформу симметричной. На плате есть крепежные отверстия для Arduino-подобных контроллеров. На борту имеется микросхема измерения напряжения и потребляемого тока. Используемый интерфейс – I2C
Документация: MGB-MDYN1
Характеристики:
Применяемая микросхема генерации ШИМ сигнала и управления моторами: PCA9685
Применяемая микросхема измерения напряжения и потребляемого тока: INA226
Интерфейс управления платой: I 2C
Количество одновременно подключаемых плат: 16
Количество моторов на одной плате: 2
Тип применяемых моторов: N20
Напряжение питания цифровой схемы: 2.7 … 5.5 В
Напряжение питания моторов: 6.5 … 30 В
Максимальный ток на один мотор: 2.5 А (можно увеличить до 3.6 А)
Количество разъемов для подключения цифровой схему: RJ-9 x 2, PLS-4 x 1
Количество разъемов питания моторов: 2
Защита от неправильной полярности моторов: Есть
Защита от перенапряжения питания: Есть
Защита от короткого замыкания: Есть
Защита от перегрева драйверов моторов: Есть
Индикация питания цифровой схемы: Есть, синий светодиод
Индикация питания моторов: Есть, зеленый светодиод
Индикация защит по току и напряжению: Есть, красный светодиод (управление программное через INA226)
Индикация работы моторов и полярности: Есть, желтые и белые светодиоды
Крепежные отверстия для контроллеров типа Arduino / Йотик 32: Есть
Крепежные отверстия для шаровых опор: Есть
Крепежные отверстия для датчиков линии: Есть
Крепежные отверстия для батарейного отсека, DC-DC преобразователя и других модулей: Есть на верхней присоединяемой плате
Диапазон рабочих температур: -40 … +85 ºC
Размеры платы (без моторов, колес, шаровых опор, контроллера и датчиков): 104 x 88 x 16 мм
![]()
![]()
![]()
![]()